![]()
![]()
橋梁保全の研究と実践を積み重ねてきた「大日本コンサルタント株式会社」と、橋梁の設計施工に加え、次世代型ロボットの開発にも強みを持つ「川田テクノロジーズ株式会社」が共同し、「国立研究開発法人産業技術総合研究所」の支援を受け、橋梁点検のニーズを満たしたドローン、空飛ぶデジカメ「マルコ®」を開発しました。
本開発は、新エネルギー・産業技術総合開発機構(NEDO)「インフラ維持管理・更新等の社会課題対応システム開発プロジェクト」の一環として2014年度から2017年度に行ったものです。
2018年度以降も開発を継続し、2019年2月には、国土交通省の「新技術利用のガイドライン(案)」における「点検支援技術性能カタログ(案)」に登録し、実際の点検業務での利用が始まりました。また、国土交通省などが行なった自治体講習会の場での技術紹介に参画したほか、2020年度には株式会社FLIGHTSと協力して「ドローンを活用した橋梁点検講習会」「マルコ®操縦技術認定講習会」を開催するなど、利活用の促進に関する取り組みも行いました。


2018年度以降の研究開発により、マルコ®の基本性能の向上、自動制御手法の追加も行いました。
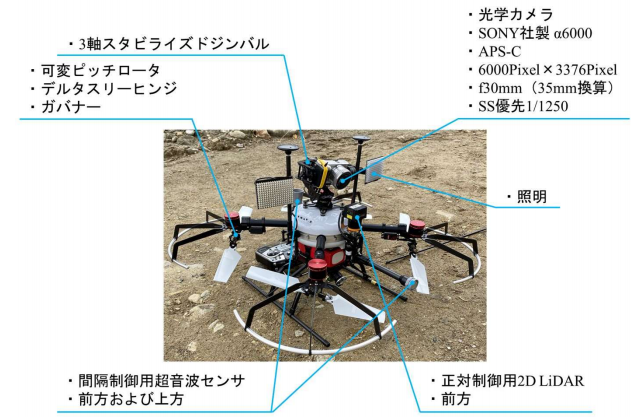
「マルコ®」の特長であった「可変ピッチロータ」とロータピッチの変更に伴う抗力の増減でロータの回転数が変わらないようにする「等速回転機構(ガバナー)」に加え、横から風を受けた時に風上方向、風下方向に回転するロータの揚力差を機械的に制御する機構「デルタスリーヒンジ」を搭載し、耐風安定性、操縦性を向上させました。
また、マルコ®(カメラ)と対象構造物との「自動間隔一定制御」に加え、「自動正対制御」を実装することにより、「あおり」がなく一定品質の画像を取得することが一層容易となりました。超音波センサと2次元のLiDARを装備し対象構造物との位置関係を把握することによって実現しています。
さらに構造物縁端を認識することで縁端からの距離を一定に保つ機能、一定速度で昇降する機能の向上を図りました。これらの自動制御技術を併用することで、操縦者の負担が軽減でき、高解像度で一定品質の画像取得が容易となりました。
2021年10月に、マルコで培った技術を市販の機体に適用し、「M300RTK-i」を新たに「点検支援技術性能カタログ」登録しました。今後は、マルコでなければ実施できない使用条件あるいは利用条件に限って活用し、それ以外は、より利用しやすく経済性に優れた「M300RTK-i」への転換を進めていく予定です。
【プレスリリース】
橋梁点検におけるドローン活用の普及に向けた活動報告(2019年2月22日)
ドローン活用に向け教育プログラム,操縦技術認定での協業を開始(2019年11月5日)
~橋梁点検へのドローン「マルコⓇ」利用ノウハウを社会に提供~
「無人航空機(マルチコプター)を利用した橋梁点検画像取得装置 Matrice 300 RTK-i」の国土交通省「点検支援技術性能カタログ」掲載について(2021年11月1日)
【マルコfacebookページ】
https://www.facebook.com/NE.MARUKO/
【WEB(ZOOM)開催「ドローンを利用した橋梁点検」無料座学講習会】
https://drone-infrastructure.com/seminar/
















